



車底掃描")
升降柱")
升降柱")


升降柱")
升降柱")
")
")




首頁
新聞動(dòng)態(tài) > 公司新聞 >
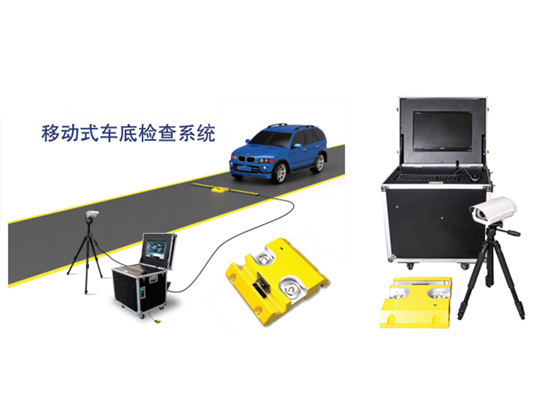
車底掃描廠家談車底掃描檢測技術(shù)
發(fā)布時(shí)間:2021-06-18
信息來源:魯飛科技
車底掃描廠家談車底掃描檢測技術(shù)
1.簡述 自適應(yīng)直方圖均衡化(AHE)主要是基于分塊處理的思想用來圖像度的一種算法,其特點(diǎn)是通過圖像的局部直方圖,然后通過重新分布圖像的亮度來改變圖像度。主要用于獲取圖像多的細(xì)節(jié)!和普通的直方圖均衡算法不同,AHE算法通過計(jì)算圖像的局部直方圖,然后重新分布亮度來來改變圖像度。因此,該算法適合于改進(jìn)圖像的局部度以及獲得多的圖像細(xì)節(jié)。 不過,AHE有過度放大圖像中相同區(qū)域的噪音的問題,另外一種自適應(yīng)的直方圖均衡算法即限制度直方圖均衡(CLAHE)算法能有限的限制這種不利的放大。
2. 算法的解釋 普通的直方圖均衡算法對于整幅圖像的像素使用相同的直方圖變換,對于那些像素值分布比較均衡的圖像來說,算法的很好。然后,如果圖像中包括明顯比圖像其它區(qū)域暗或者亮的部分,在這些部分的度將得不到的增強(qiáng)。 AHE算法通過對局部區(qū)域執(zhí)行響應(yīng)的直方圖均衡來改變上述問題。
該算法先被開發(fā)出來適用于改進(jìn)航天器駕駛艙的顯示。其簡單的形式,就是每個(gè)像素通過其周邊一個(gè)矩形范圍內(nèi)的像素的直方圖進(jìn)行均衡化。均衡的方式則完全同普通的均衡化算法:變換函數(shù)同像素周邊的累積直方圖函數(shù)(CDF)成比例。 圖像邊緣的像素需要處理,因?yàn)檫吘壪袼氐念I(lǐng)域不完全在圖像。這個(gè)通過鏡像圖像邊緣的行像素或列像素來解決。直接復(fù)制邊緣的像素進(jìn)行擴(kuò)充是不合適的。因?yàn)檫@會導(dǎo)致帶有劍鋒的領(lǐng)域直方圖。普通的AHE傾向于在圖像的近恒定區(qū)域過度放大度,因?yàn)檫@些區(qū)域的直方圖集中。因此,AHE可能會導(dǎo)致噪聲在接近恒定的區(qū)域被放大。
度受限AHE (CLAHE)是自適應(yīng)直方圖均衡化的一種變體,它限制了度的放大,從而減少了噪聲放大的問題。在網(wǎng)格中,在給定像素值附近的度放大由變換函數(shù)的斜率給出。這與鄰域累積分布函數(shù)(CDF)的斜率成正比,因此與該像素值處的直方圖值成正比。CLAHE通過在計(jì)算CDF之前將直方圖裁剪到義值來限制放大。
這限制了CDF的斜率,因此也限制了變換函數(shù)的斜率。直方圖被裁剪的值,即所謂的剪切,取決于直方圖的歸一化,因此也取決于鄰域的大小。公共值將產(chǎn)生的放大限制在3到4之間。好不要丟棄直方圖中剪輯限制的部分,而是在直方圖箱中均勻地重新分配。
3. AHE的屬性領(lǐng)域的大小是該方法的一個(gè)參數(shù)。領(lǐng)域小,度得到增強(qiáng),領(lǐng)域大,則度降低。當(dāng)某個(gè)區(qū)域包含的像素值相似,其直方圖就會尖狀化,此時(shí)直方圖的變換函數(shù)會將一個(gè)很窄范圍內(nèi)的像素映射到整個(gè)像素范圍。這將使得某些平坦區(qū)域中的少量噪音經(jīng)AHE處理后過度放大。 并生產(chǎn)全系列型號車底檢查系統(tǒng),實(shí)力雄厚,車底成像好、設(shè)備質(zhì)量穩(wěn)定。歡迎各位伙伴事宜,共同為安檢事業(yè)做出貢獻(xiàn)!
車底掃描廠家——深圳市魯飛智能科技有限公司,座落于深圳市龍崗區(qū)坂田街道馬安堂社區(qū)中興路。公司成立伊始就秉承了“務(wù)本求實(shí),追求”的企業(yè)文化。以不斷的經(jīng)營理念為先導(dǎo),建立學(xué)習(xí)型組織和精良團(tuán)隊(duì),引進(jìn)人才,創(chuàng)建開放式的企業(yè)管理模式,了企業(yè)化,多方位的健康發(fā)展。
